Загальні відомості та класифікація роторних гідромашин.
Під роторними (ГМ) розуміють об'ємні насоси і гідромотори, у яких рухливі робочі елементи, що утворюють робочі камери, роблять обертальний рух чи обертальний в сполученні зі зворотно-поступальним рухом. Роторні (ГМ) знайшли широке застосування в гідроприводах, тому що мають малу питому масу й об’єм, що приходиться на одиницю потужності, високий ККД, можливість регулювання і реверса подачі. Вони швидкохідні (1500…5000хв-1 ), не мають клапанів і, як правило, обратимі, тобто можуть працювати як у режимі насоса, так і в режимі гідромотора. Робоча рідина - мінеральні масла. По характеру руху робочих органів роторні (ГМ) підрозділяють на роторно-поступальні і роторно-обертальні. Роторно-поступальні (ГМ) бувають двох типів: роторно-поршневі і роторно-пластинчасті. Роторно-поршневі (ГМ) по напрямку руху поршня розрізняють: - аксіальні з похилим циліндровим блоком чи з похилим диском; радіальні - роторно-плунжерні.
Аксіальні роторно-поршневі (плунжерні) ГМ із похилим нерухомим чи поворотним диском знайшли широке застосування на мобільних сільськогосподарських машинах. На рис.1, а приведений аксіальний роторно-поршневий (плунжерний), регулюємий насос з похилим диском, а на рис.2 б його умовне графічне зображення.
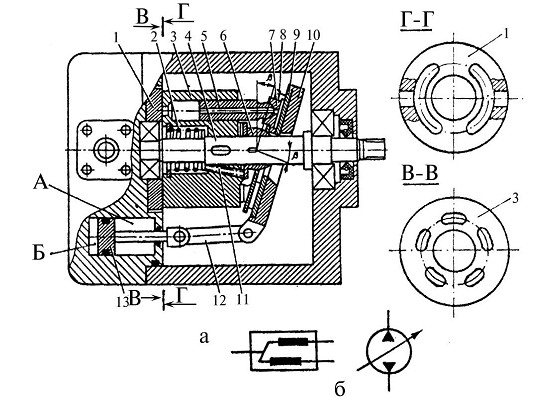
Рис. 1 Аксіальний роторно-поршневий регулюємий насос з похилим диском(а) і його умовне позначення(б).
Блок циліндрів 3 установлений на валу 4 і піджатий пружинами 2 і 11 до розподільного диска 1. У циліндрах блоку розміщені поршні 5, що через башмаки 7 спираються на опорне кільце 9 похилого диска 10. Башмаки у свою чергу притиснуті до опорного кільця 9 пружинами 2 і 11, через втулку 6 зі сферичною зовнішньою поверхнею і сепаратор 8. Поворот похилого диска 10 на кут здійснюється через тягу 12 переміщенням поршня 13 механізму керування. При підведенні рідини в порожнини А и Б циліндра механізм керування змінює кут нахилу шайби (похилого диска) у межах кута
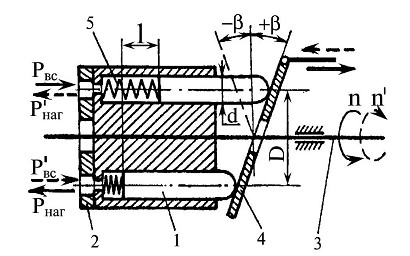
Рис. 2 Схема кінематична аксіальної роторно-поршневої (плунжерної) гідромашини з поворотним диском
При обертанні вала 3 плунжери 1 роблять зворотно-поступальний рух у циліндрах ротора. При цьому гідромашина працює в режимі насоса: плунжер 1 рухається вправо, відбувається усмоктування (рвс) рідини в порожнину циліндра, а коли він рухається вліво, то рідина виштовхується з нього (рнаг). Величина ходу плунжера 1 залежить від кута нахилу опорного, поворотного диска 4. Коли поверхня похилого диска 4 перпендикулярна осі вала 3 (β=0) плунжери 7 зворотно-поступального руху в циліндрах не роблять (l=0). За один оборот вала 3 кожен плунжер робить хід ( рис. 2) вправо, усмоктуючи з порожнини (рвс) об’єм рідини:
і один хід уліво, виштовхуючи цей об’єм у нагнітальну порожнину(рнаг ).
Теоретична подача насоса за один оборот вала, що має в роторі z плунжерів, буде дорівнювати:
Дійсна подача насоса (Q), що має частоту обертання n приводного вала 3, може бути знайдена з рівняння:
Якщо в порожнину нагнітання насоса (рнаг) подати тиск від іншого насоса, то на плунжері виникає зусилля від цього тиску, що розкладається на дві складові в точці дотику голівки плунжера з поверхнею опорної шайби 4.
Під дією окружної складової цього зусилля ротор гідромашини починає обертатися і гідромашина працює в режимі гідромотора. При цьому з вала 3 можна знімати механічну енергію. При зміні напрямку обертання вала 3 (з n на n`) чи зміні кута нахилу шайби з (+β ) на (-β ) (рис. 2) змінюється напрямок руху потоку рідини рвс на р`вс і рна на р`на.