Кінематичний розрахунок коробок швидкостей
Для кінематичних розрахунків коробок швидкостей у верстатобудуванні застосовують два методи: аналітичний та графоаналітичний. Обидва методи дозволяють знаходити величини передаточних відношень передач, що входять в коробку швидкостей. Однак, як правило, використовують тільки графоаналітичний метод. Перевагою його є те , що він дозволяє швидко знаходити можливі варіанти рішення, дає більшу наочність (що полегшує порівняння варіантів). При графоаналітичному методі послідовно будують структурну сітку і графік частоти обертання.
Структурна сітка дає чітке уявлення про структуру приводу верстата. По структурній сітці легко простежити зв'язки між передаточними відношеннями групових передач (груповою передачею називають сукупність передач між двома послідовними валами коробки швидкостей); проте сітка не дає конкретних значень цих величин. Вона наочно характеризує ряд структур приводів в загальній формі. Структурна сітка містить наступні дані про привід: кількість груп передач, кількість передач в кожній групі, відносний порядок конструктивного розташування груп уздовж ланцюга передач, порядок кінематичного включення груп (тобто їх характеристики та зв'язок між передавальними відношеннями), діапазон регулювання групових передач і всього приводу, число частот обертання ведучого і веденого валів групової передачі.
Графік частоти обертання дозволяє визначити конкретні величини передаточних відношень усіх передач приводу і частоти обертання всіх його валів. Його будують відповідно до кінематичної схеми приводу. При розробці кінематичної схеми коробки швидкостей верстата з обертальним головним рухом повинні бути відомі: число ступенів частоти обертання шпинделя z , знаменник геометричного ряду φ , частоти обертання шпинделя від n1 до п z і частота обертання електродвигуна п ед.
Число ступенів частоти обертання шпинделя z при налагодженні послідовно включеними груповими передачами (в многовалових коробках) дорівнює добутку числа передач у кожній групі, тобто z = р а рbpc ….pk . Наприклад, для приводу, показаного на рис. 1, z = р а р ъ р с = 3*2*2 = 12.
При заданому (або вибраному) числі z ступенів ряду частоти обертання шпинделя число груп передач, кількість передач в кожній групі і порядок розташування груп можна вибирати різними. Цей вибір в основному і визначає конструкцію коробки швидкостей.
Для найбільш часто вживаних значень z можуть бути використані наступні конструктивні варіанти:
z= 4 = 2*2;
z = 6 = 2*3 = 3*2;
z = 8 = 2*2*2 = 4*2 = 2*4;
z = 12 = 3*2*2 = 2*3*2 = 2*2*3 == 3*4 = 4*3;
z = 16 = 2*2*2*2 = 4*2*2 = 2*4*2 = 2*2*4 = 4*4;

Рис. 1. Схеми коробки швидкостей на 12 ступенів з послідовним включенням груп передач:
а- кінематична; б - структурна
z = 18 = 2*3*3 = 3*2*3 = 3*3*2;
z = 24 = 3*2*2*2 = 2*3*2*2 = 2*2*3*2 = 2*2*2*3 = 2*3*4 = 2*4*3 = 3 *2*4 = = 3*4*2 = 4*2*3 = 4*3*2.
У верстатах зі зміною частоти обертання шпинделя по геометричному ряду передаточні відношення передач у групах утворюють геометричний ряд із знаменником φx , де х - ціле число, яке називають характеристикою групи. Характеристика групи дорівнює числу ступенів швидкості сукупності групових передач, кінематична попередніх цієї групи . Загальне рівняння налагодження групових передач має наступний вид:
і1:і2:і3:….ір=1:φх:φ2х:….:φ(р-1)х.
Для послідовного отримання всіх частот обертання шпинделя спочатку перемикають передачі однієї групи, потім другий і.т. д. Якщо в коробці швидкостей, що на рис. 1, використовувати з цією метою насамперед передачі групи а, потім групи с і в останню чергу групи б, то відповідно до цього порядку перемикання група а буде основною, група с - першою переборною, група б - другою переборною. Коробка передач може мати і більше число переборних груп.
Для основної групи передач характеристика х 0 = 1; для першої переборної групи х 1 = р1 для другої групи переборної х 2 = р1/р2 і т. д., де р1 і р 2 - відповідно числа передач основної і першої переборної групи.
Для конструктивного варіанту приводу, показаного на рис. 9.1, і прийнятого порядку перемикань швидкостей можна написати структурну формулу z = 3 (1) *2 (6) *2 (3). У формулі цифрами в дужках позначені характеристики груп. Основної і різними за номером переборними групами може бути будь-яка група передач до приводу. Тому поряд з конструктивними варіантами приводу можливі також різні його кінематичні варіанти.
Щоб уникнути надмірно великих діаметрів зубчастих коліс в коробках швидкостей, а також для нормальної їх роботи встановлені такі граничні передаточні відношення між валами при прямозубому зачепленні:  ; звідси найбільший діапазон регулювання групової передачі буде
; звідси найбільший діапазон регулювання групової передачі буде
(іmax/imin)= 
Відношення (іmax/imin) має найбільшу величину для останньої переборної групи приводу. Отже, для коробок швидкостей
(іmax/imin)=φ(р-1)хmax 
де Хmах - найбільший показник для останньої переборної групи; р - число передач в цій групі.
Для графічного зображення частот обертання шпинделя верстата зазвичай використовують логарифмічну шкалу чисел. З цією метою геометричний ряд частот обертання
n2=n1φ;
n3= n1φ 2;
n4= n1φ 3;
……….
nz= n1φ z-1;
логарифмують:
lg n2 = lg n1 + lg φ;
lg n3 = lg n1 + 2 lg φ;
lg n 4 = lg n 1 + 3 lg φ;
…………………………
lg n z = Lg n1 + (z - 1) lg φ;
звідки
lg n 3 = Lg n 2 = lg φ;
lg n4 - lg n 3 = Lg φ;
…………………….
lg n z - lg n z-1 = Lg φ = const.
Таким чином, якщо відкладати на прямій лінії послідовні значення логарифмів частот обертання п 1, п 2, п 3,….. п z, то інтервали між ними будуть постійними і рівні lgφ.
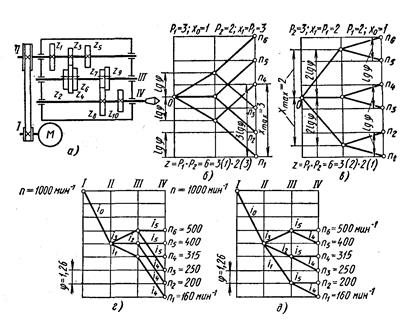
Рис. 2. Кінематична схема, структурні сітки та графіки частоти обертання коробки швидкостей на шість ступенів.